Finger
The four fingers are named according to the UK convention: First, Middle, Ring, Little.
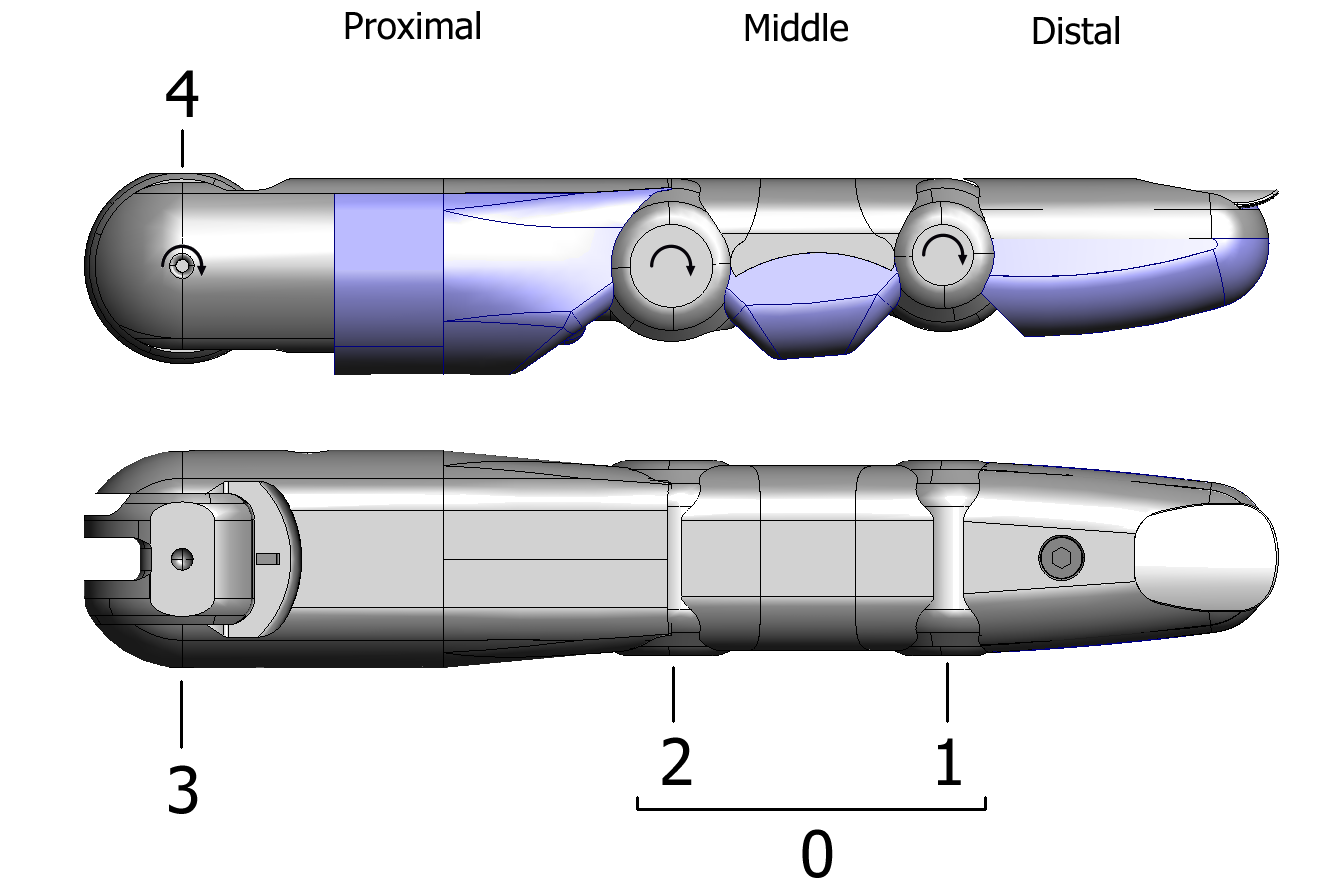
Naming and angle conventions
The four finger joints are the distal (finger tip), middle, proximal (nearest the palm), and the adduction/abduction joint (sideways movement) which is coplanar with the proximal joint. Joints are numbered from 1, starting at the distal end. Arrows on the diagram show the direction of positive rotation. Lines show the axis of rotation. For joint 4s, spreading the fingers is negative rotation. i.e. for FF and MF, anti-clockwise is positive, and for RF and LF, clockwise is positive.
Loopback tendons and J0 coupling
In order to reduce the number of actuators in the forearm, joints 1 and 2 of the fingers are coupled together such that:
joint1 angle <= joint2 angle
Any flexion of joint 1, beyond the angle of joint 2, forces joint 2 to flex to maintain the constraint. Joints 1 and 2 are together connected to one motor. For the purposes of control, they are considered to be a single joint, 0 (zero).